Intelligent Agv 6-axlig Freedom Collaborative robotarm för palletering


Intelligent Agv 6-axlig Freedom Collaborative robotarm för palletering
Huvudkategori
AGV AMR / lyftanordning AGV AMR / AGV automatiskt styrt fordon / AMR autonom mobil robot / AGV AMR-bil för industriell materialhantering / Kina tillverkare AGV-robot / lager AMR / AMR lyftanordning laser SLAM-navigering / AGV AMR mobil robot / AGV AMR chassi laser SLAM-navigering / intelligent logistikrobot
Ansökan

AMB-seriens obemannade chassi för autonoma AGV-fordon är ett universellt chassi designat för autonoma styrda AGV-fordon och erbjuder funktioner som kartredigering och lokaliseringsnavigering. Detta obemannade chassi för AGV-vagn erbjuder rikliga gränssnitt som I/O och CAN för att montera olika övre moduler tillsammans med kraftfull klientprogramvara och dispatchsystem för att hjälpa användare att snabbt slutföra tillverkning och tillämpning av autonoma AGV-fordon. Det finns fyra monteringshål på toppen av AMB-seriens obemannade chassi för autonoma styrda AGV-fordon, vilket stöder godtycklig expansion med domkrafter, rullar, manipulatorer, latent dragkraft, display etc. för att uppnå flera tillämpningar av ett chassi. AMB kan tillsammans med SEER Enterprise Enhanced Digitalization realisera enhetlig dispatching och distribution av hundratals AMB-produkter samtidigt, vilket avsevärt förbättrar den intelligenta nivån av intern logistik och transport i fabriken.
Särdrag
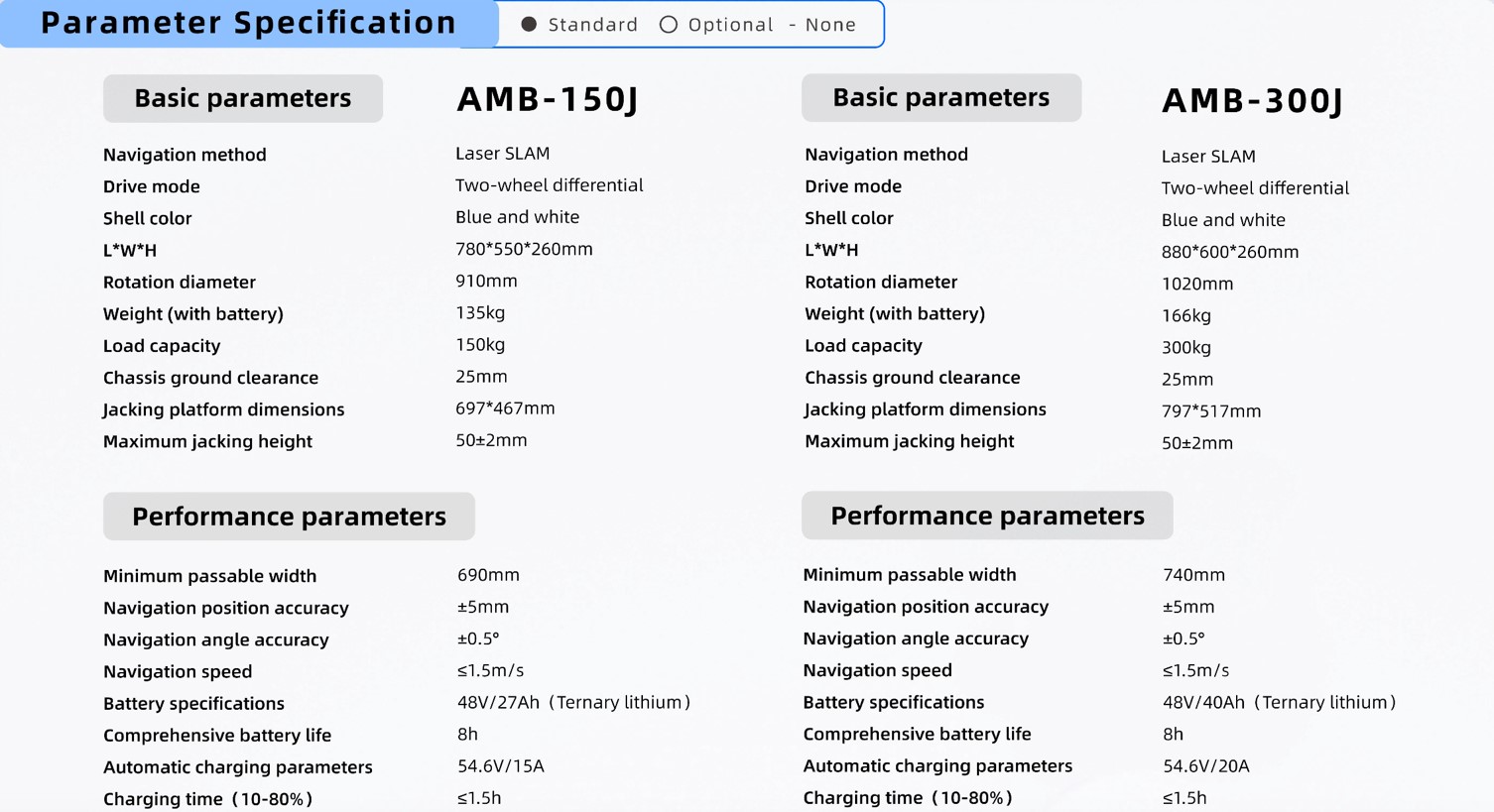
·lastkapacitet: 150 kg och 300 kg
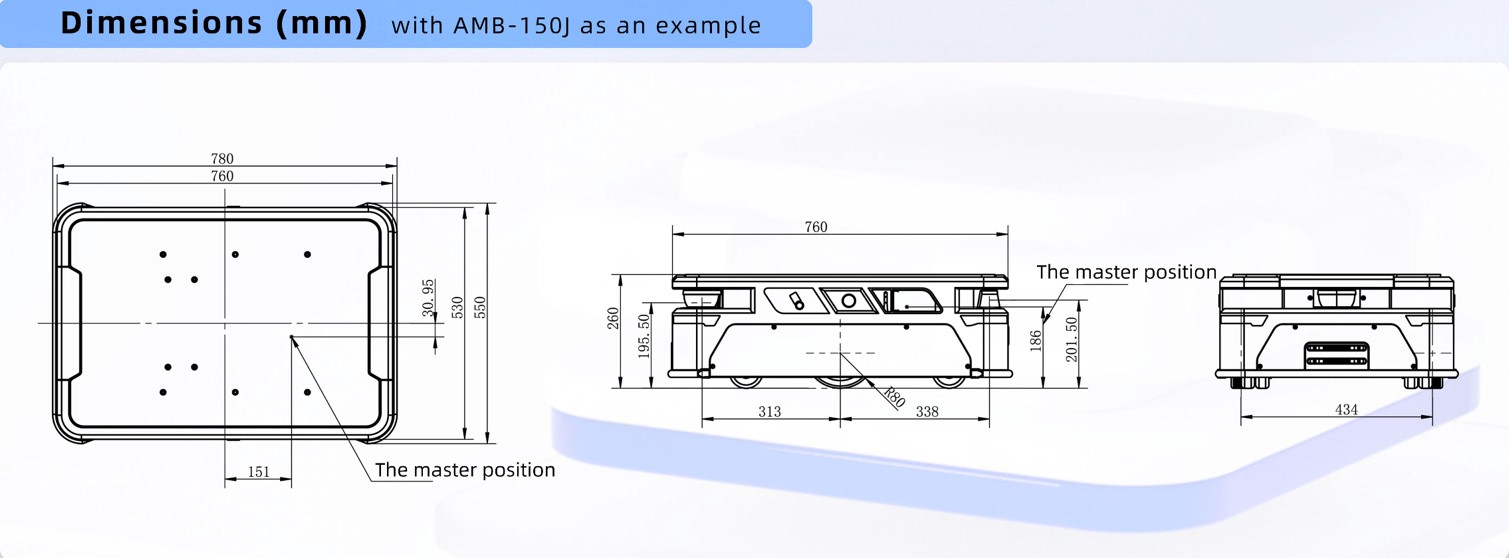
·max. lyfthöjd: 50 mm
· Navigationspositionens noggrannhet: ±5 mm
·navigationsvinkelnoggrannhet: ±0,5°
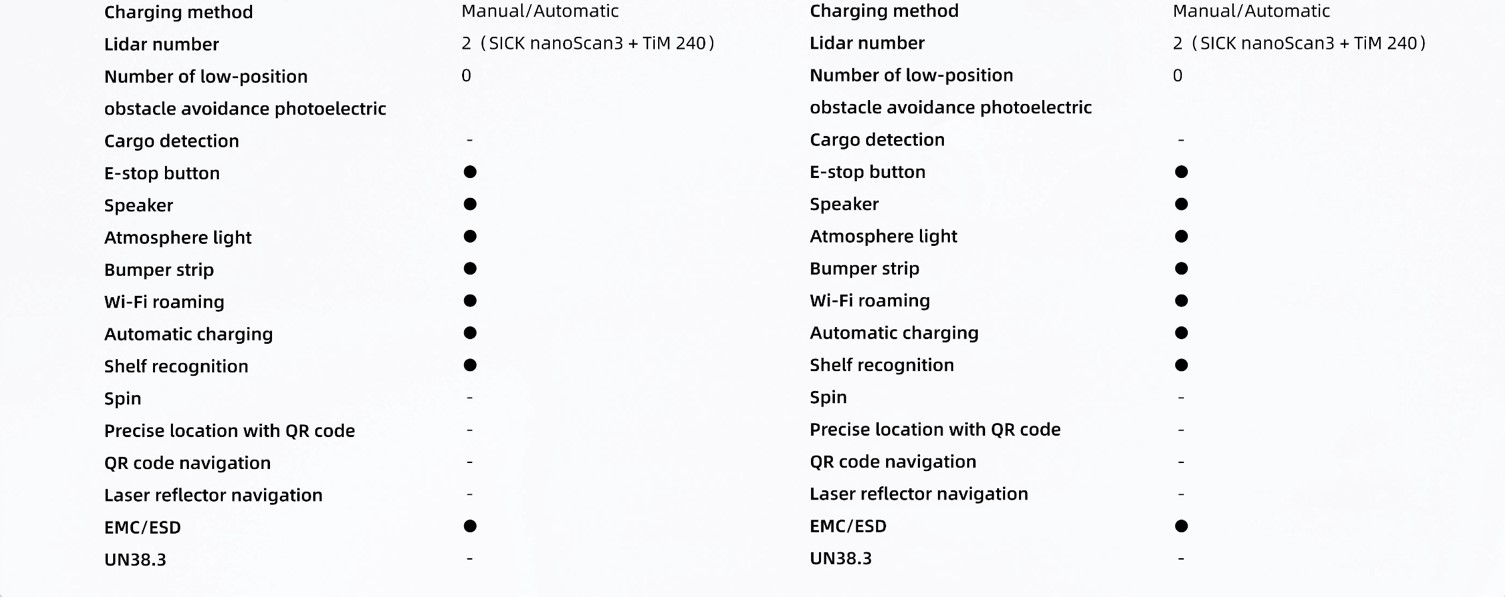
● Avancerade funktioner tillgängliga när som helst
Omfattande och utmärkta standardfunktioner och rika och praktiska avancerade funktioner hjälper kunderna att enkelt uppnå intelligent logistik.
● Plattformar med flera specifikationer tillgängliga för expansion
Tillhandahåller plattformar på 150 kg och 300 kg för att möta last- och miljökraven inom olika branscher. Den kan också användas med manipulatorer, rullar, domkrafter, latent dragkraft, panorering/tilt, bildskärm etc. för att uppnå flera tillämpningar med ett chassi.
● ±5 mm, effektiv och noggrann
Laser SLAM-algoritmen används för att uppnå högprecisionslokalisering, med laserns icke-reflekterande repeterade lokaliseringsnoggrannhet inom ±5 mm, vilket möjliggör sömlös dockning mellan mobila robotar och människor, och effektivt flöde av last mellan olika punkter. Obs: Faktiska värden beror på miljöförhållanden.
● Stabil navigering för säkerhet och tillförlitlighet
Laser SLAM-navigering, laserreflektornavigering, QR-kodnavigering och andra navigeringsmetoder är perfekt integrerade och sömlöst kopplade för att säkerställa den mobila robotens stabila arbete.
● Enkel implementering och synlig hantering
Ett komplett utbud av stödjande programvara och digitala system kan enkelt realisera drift, schemaläggning och informationshantering av mobila robotar, och sömlöst ansluta till fabrikens MES-system för att verkligen förverkliga smart logistik.
Relaterade produkter



Specifikationsparameter
Vår verksamhet


Produktkategorier
-

Robotgripare Elektrisk 2-fingrar Parallell med ...
-

Hitbot Zarm 2140c Robot Industrial 4 Axis Scara...
-

Kina Tillverkningskvalitet 6 Axis Industriell Rob...
-

303ED Bästa pris Pick and Place robothandindu...
-

Het försäljning 5 kg nyttolast Cobot industrirobot Rob...
-
2021 Het rea samarbetsrobot 6-axlig 3 kg Ai...